赛博利特开发的全电驱MPD系统经过严格用户测试,通过用户最终验收。
随着油气资源的日渐衰竭,油气勘探开发面临越来越多的更深更复杂地层。在钻探这些深层复杂地层时,时常出现井涌、井漏、有害气体泄漏等钻井复杂问题,增加了钻井成本和作业风险。
赛博利特针对复杂深层油气勘探开发中遇到的技术难题,结合最新的钻井设备技术,研发了MPD精细控压钻井控制系统。系统集成网络技术、物联网技术、伺服控制技术、自动控制技术、先进优化控制等技术为一体,通过对地面数据实时采集、分析和处理,可实现自动调节套压、立压,实现压力的精细控制,同时支持流量控制,可快速应对钻井过程中的井涌、井漏等突发情况。
1.系统结构
本项目采用了倍福CX5130计算平台作为底层计算底座
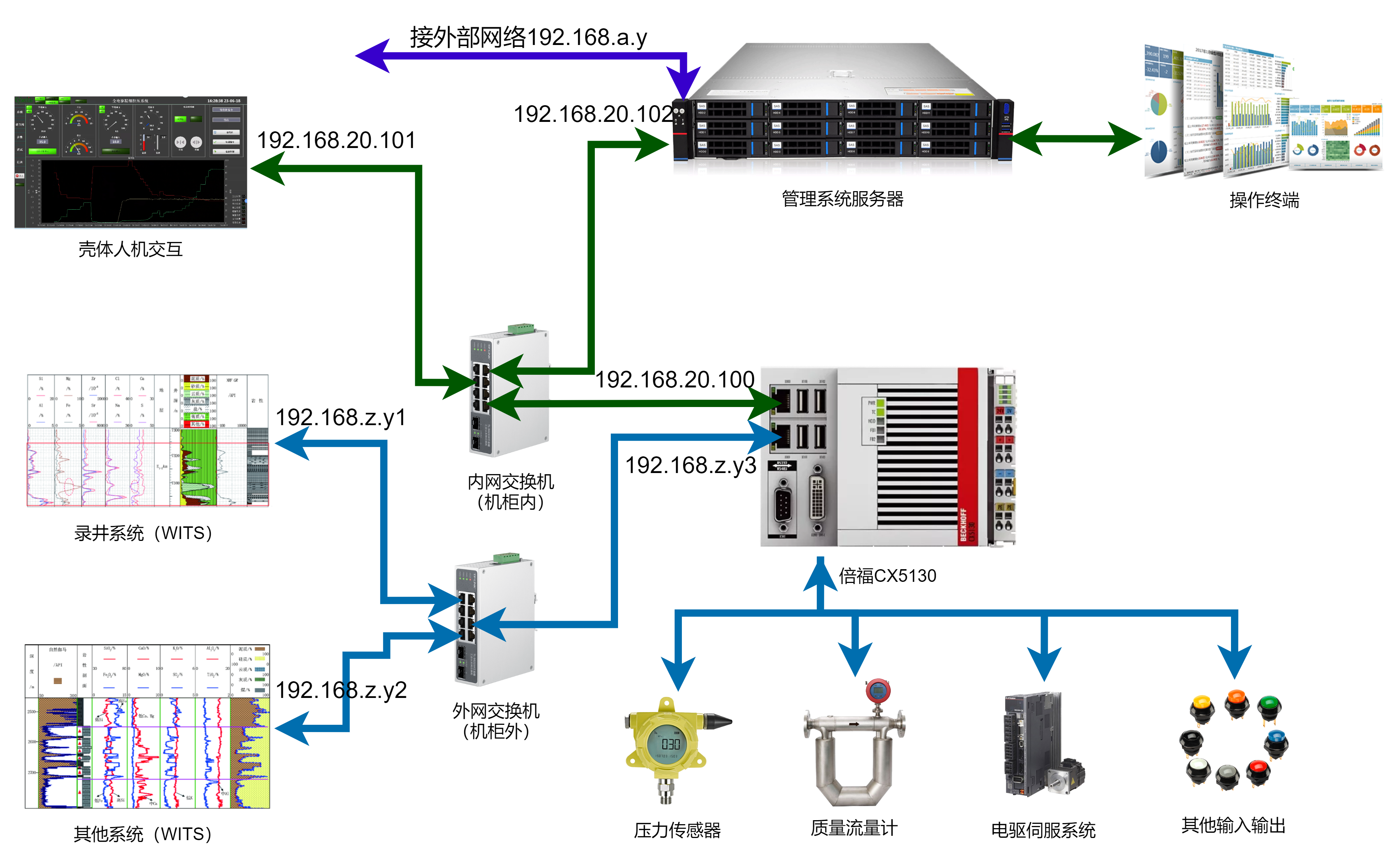
系统拓扑结构图
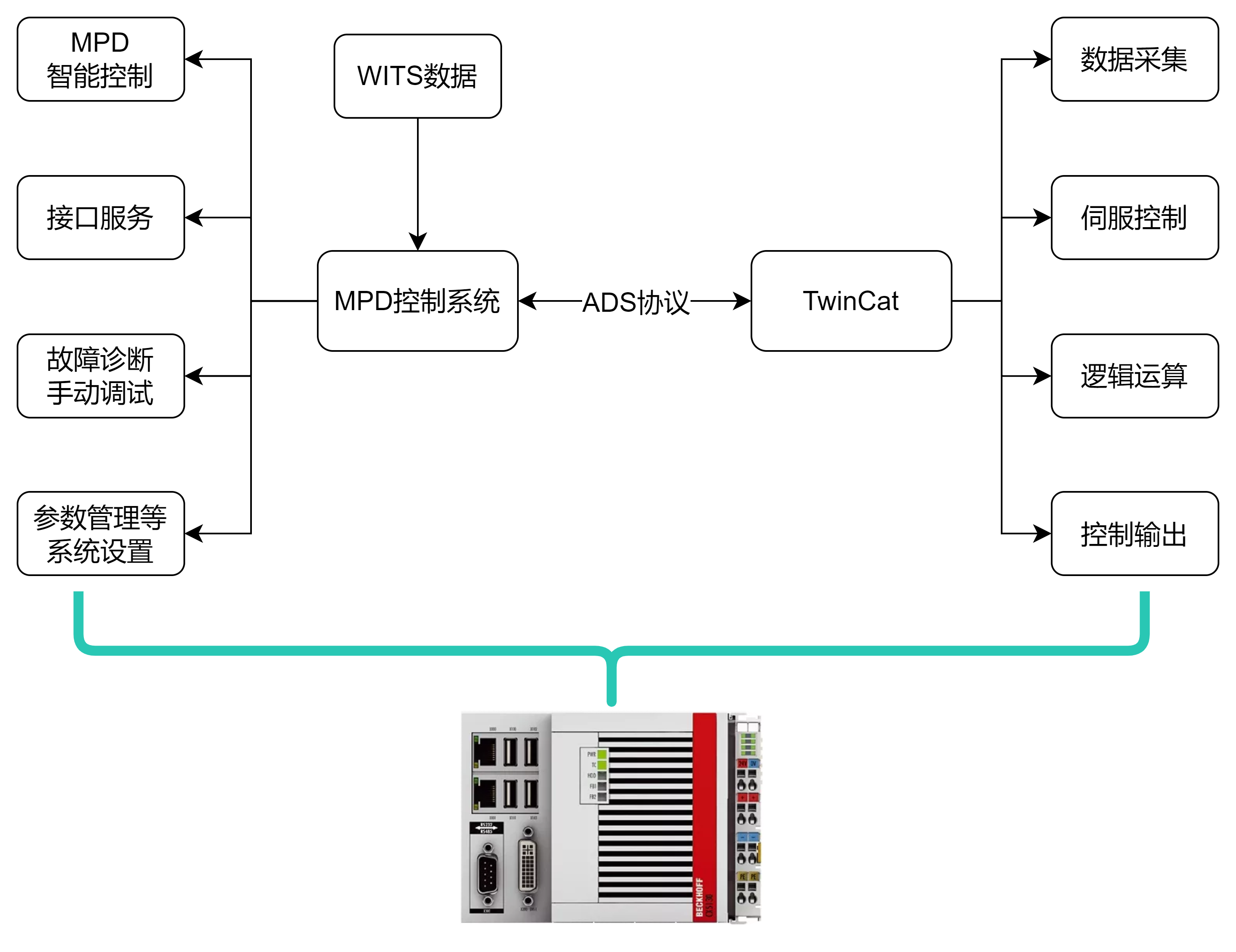
软件系统架构图
2.系统功能
本系统通过倍福TwinCat系统实现信号采集、逻辑运算、伺服控制及控制输出,通过MPD控制程序实现核心调节控制算法、接口服务、故障诊断、手动调试、参数管理等功能。
MPD控制系统包含了专用电驱MPD控制器,直推电缸运动伺服控制驱动,实时交互接口,WITS解析转发,无扰切换及应急保护等,支持套压调节、立压调节、流量调节3种调节控制模式,上位系统可任意切换模式或解除控制。
主要功能描述如下:
2.1专用电驱MPD控制器
电驱版MPD智能控制器包含了包括3个(套压、立压、流量)MFA控制器,实现立压控制,套压控制及流量控制。
2.2立压控制
实现对立压的控制,操作人员发送切换为立压控制模式指令后,MPD系统切换为立压控制模式,初始的立压目标取自当前立压测量值,操作人员通过系统界面设定新的目标值,由MPD控制完成立压的调节控制,使立压值稳定在目标值附近。
2.3套压控制
实现对套压的控制,操作人员发送切换套压控制模式指令后,MPD系统切换为套压控制模式,初始的套压目标取自当前套压测量值,操作人员通过系统界面设定新的目标值,由MPD控制完成套压的调节控制,使套压值稳定在目标值附近。
2.4流量控制
实现对流量的控制,系统实时监视流量变化并给出预警提示,有操作人员判断出现井涌或井漏流量异常后,发送切换为流量控制模式指令,MPD系统切换为流量控制模式,流量目标值目标为WITS数据中的井口入口流量,MPD控制完成流量的调节控制,使流量回归到入流流量附近,流量稳定后自动切换至立压控制或者解除流量控制提示人工介入处理。
2.5PAC控制
基于TwinCat平台,通过IO模块实现对模拟量信号,状态信号的采集,通过通讯模块实现对流量计数据的采集,通过运动模块通过对电机的控制实现直推电驱节流阀的控制。直推电缸运动伺服控制驱动是基于倍福TwinCat2系统、高性能伺服控制器结合直推电缸而开发的伺服运动控制系统。
2.6WITS数据转发
MPD控制系统支持WITS协议,在本系统中,井场提供的WITS协议数据通过MPD控制系统接收,接收到的数据一部分用于控制运算,同时MPD控制系统可将接收到的WITS数据重新打包转发给其他系统。
2.7MPD多模式控制无扰切换与应急保护
无扰切换包括:2种模式(手动、自动)、2路节流通道(2个节流阀)2种目标来源(手动+水力计算)
应急保护包括:超压自动泄压保护、低压自动恢复保护等。
2.8参数管理
MPD控制系统具备参数管理功能,系统参数修改指令后,参数自动保存,在开机后自动加载最新的参数,同时具备参数自动备份功能,每次修改参数,旧参数自动备份。
2.9手动调试
提供手动调试功能,可通过手动功能查看采集到信号状态,可手动操作闸板阀的开开闭,手动设置节流阀的开度,查看伺服控制器的状态等,此功能仅用于动作调试及故障分析。
3运行效果
经过一系列多种场景工况的调试,赛博利特开发的MPD系统均可达到预期的效果:
- 电动直驱节流阀调节精度小于0.1%,全开全闭动作时间小于10S
- 压力调节的快速响应不超调,压力控制偏差小于0.1MPa,流量控制偏差小于2L/S
- 控制算法具备变增益控制功能,可有效应对阀门非线性特性,在不同排量下均可快速完成调节控制,稳定目标值。
